所谓太空机器人,主要用于在太空中维修“瘫痪”的人造卫星和探测月球或行星。太空机器人所工作的微重力环境,其力的作用与地面迥然不同,因此,如何控制太空机器人,使其完全能按照人的意愿执行太空任务,是当前摆在科学家面前的一个重要课题。
美国航空航天局(NASA)于1990年发射了“哈勃”太空望远镜,数年之后又对其进行了改造——由宇航员在太空中通过舱外操作来更换其观测装置。
毋庸置疑,即使是训练有素的宇航员,在太空中执行舱外作业也是一项非常危险的任务。并且,宇航员的舱外训练需要相当高的成本。那么,这种作业是否可由太空机器人替代呢?目前,日本东北大学吉田教授领衔的研究室正在致力于这一领域的探索。
克服微重力是关键之一
吉田研究室所研究的对象,主要是探索在地球周围轨道上的太空机器人、行星探测器,以及火星、月球探测车等如何在微重力环境下开展工作。由于轨道、月球表面等处重力很小,其力学环境与地面迥然不同。只有在充分了解微重力环境下的力学特点之后,才能掌握如何控制机器人的方法。
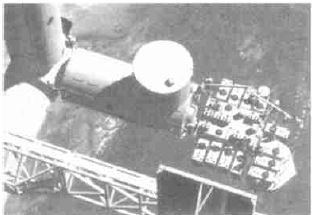
开发太空机器人,克服微重力是关键之一。在地球周围轨道上,当机器人通过机械臂捕获卫星进行维修作业时,处于脚不着地、漂浮的状态。此时,只要机械臂稍一动作(在反作用力下),机器人本体也产生了移位。如果不摆脱这种反作用力,在机械臂的移动过程中本体也就移动了。即使将机械臂伸向目标卫星的方向,它的位置也会发生偏移。乍看起来,对机器人的动作控制非常复杂。但吉田教授认为,这是因为我们对处在太空环境下的机器人如何动作比较生疏的缘故。从力学上来看,其实这是一种比地面干扰少得多的单纯动作。如果能很好地把握其力学性质,即使在漂浮状态下,机器人也能如人所愿完成其任务。
首先,必须保证机械臂在作移动时,机器人本体要稳如泰山。一旦本体移位,就有可能使其天线的方向发生偏移,而中断地面与机器人之间的通信。因此,设想在机器人本体上安装吸收反作用力的姿态控制装置,但这就需要设计更为复杂的结构,目前还难以做到——目前的研究思路拟利用机械臂自身的部位来消除其产生的反作用力。
机械臂的控制技术
机械臂有好几个关节。简单地说,当某部位作顺时针旋转时,让其他关节作逆时针旋转,这样就可以在机械臂内部消化掉其移动时产生的反作用力。从1995年起,吉田研究室就对这个创意进行了地面实验。1999年,又在太空中的“菊花7号”(技术试验卫星Ⅶ型)上进行了实验。实验进展得非常顺利,硬件不改动,仅改变控制方法就可以将机器人本体的反作用力降低到最小。
目前,搭载在航天飞机或国际空间站上的机械臂在操作中都缓缓而行。因为动作幅度一大,反作用力就随之增大,易引发机械臂的振动。所以搭载在航天飞机上的机械臂在进行太空操作时,往往在缓缓转动机械臂后,让其停顿一下,待其振动及摇晃基本停止后,再次转动机械臂。若能在太空中有效地遏止机械臂的振动,其作业效率将会大大提高。
不久之后,将与国际空间站对接的日本“希望号”实验舱也要做这方面的试验。“希望号”有一个专门供试验用的“暴露舱”——利用机械臂来替换暴露在宇宙空间的实验装置。搭载在“希望号”上的机械臂是由类似于人体手腕的母臂和食指的子臂组成,子臂设计得能进行非常精确的作业。
“希望号”上的机械臂长约10米,如此长度很易产生振动。根据其设计标准,位置精度的误差要控制在正负一英寸以下。但即使能精确地控制子臂,若作为基础的母臂不能消除或吸收反作用力而晃动,在设计上也就完全失去了意义。
目前,空间站上的机械臂操纵基本上都依赖于经过长期训练的宇航员。吉田研究室正在根据“希望号”的地面实验数据,模拟在太空中如何控制机器人的方法,使得即使没有经过特别训练的人,也能在太空中轻而易举地操纵机器人。
修理发生故障的人造卫星
那么,机械臂的控制研究前景又是如何呢?对此吉田教授认为,最终目标是研制出能在轨道上服务的太空机器人。人造卫星必然有使用寿命,当姿态控制系统的燃料用尽或发生其他什么故障时,人造卫星就会“瘫痪”。所谓“轨道服务”就是利用太空机器人对这类人造卫星作燃料补给或维修延长其使用寿命。
地球周围的空间漂浮着许多被称为“太空碎片”的垃圾,其中大部分是已寿终正寝的或发生故障的人造卫星;另外,也有因发射失败而未能进入预定轨道的卫星。这些“太空碎片”一旦撞击其他卫星,后果不堪设想;而从事轨道服务的太空机器人此时可大显身手,在太空中收集垃圾,然后将它们送入大气层自行烧毁。
今后,如果将搭载在人造卫星上的仪器都预先设计成像“哈勃”太空望远镜那样的可替换部件,那就方便得多了。只要通过太空机器人将超期服役的部件换下,其又可焕发青春。
太空机器人的另一个重要作用,就是捕获发射失败的卫星,通过稍许加速将其送入目的轨道,继续完成它的使命。
“隼鸟号”小行星探测器
2003年5月,日本发射了“隼鸟号”小行星探测器。“隼鸟号”的使命之一是与小行星在太空中瞬间接触(撞击)采样后返回地球。目前它正在飞向小行星的途中。吉田研究室也参与了“隼鸟号”的开发,就采样的方式、采样时探测器的运作进行了仔细研究。
“隼鸟号”的研究开始于8年前,起初认为,对轨道上的太空机器人的控制,即漂浮状态下的控制与行星探测无关。以后发现,事实并非如此,首先需要对“隼鸟号”与小行星表面接触时产生的冲击力作出恰如其分的评估。根据撞击时的环境条件推测,探测器与小行星接触瞬间所产生的冲击力具有使其被撞翻甚至撞毁的可能。对此问题,吉田研究室通过使用模型的基础实验及计算机模拟试验进行了慎重的反复研究。
吉田教授在实验室研究太空机器人装置
“隼鸟号”的目标是被命名为“ITOKAWA”的小行星。实际上,人们对其表面的情况几乎一无所知,它的表面究竟是布满岩石还是被沙石覆盖?因此,计算机模拟试验时设想了各种各样的情况。
吉田教授说:“小行星表面的情况在“隼鸟号”接触之前是不知道的,我们预想了各种可能性,研究一种能使探测器安全、可靠的采样方法。如果“隼鸟号”在接触小行星后能平安归来,我们就能揭开小行星的许多谜底。
太空机器人的自律控制
除了重力之外,必须要考虑的问题还有几个。其中之一:太空机器人一旦发射,必须要依赖地面遥控或机器人自行判断的自律控制。因为是无人飞船,人无法在现场操控。而由地面遥控就产生了通信时间延迟的问题,即使将指令送往轨道高度为500~600千米的卫星上时,因要经过各种网络或数据中转卫星等环节,信号的来回也需要数秒时间。像月球、火星之类遥远的天体,需要的时间则更多。因此,机器人此时必须能作自行判断并调整其工作节奏。
由“菊花7号”的实验得知,若是某种程度的时间延迟,“预测显示”的技术非常有效。所谓“预测显示”是指当在地面上遥控操纵轨道上的机械臂时,用计算机图示法预测下次的动作,并在显示器上得到图形显示。若是月球那样的距离,完全可以克服时间延迟带来的影响。
但是“隼鸟号”无法实现这样的遥控操纵,当它抵达小行星时,已距地球有3亿千米之遥,仅是电波的往返就得需要30分钟左右,一旦判断失误,就有与小行星碰撞的危险。若要通过地面的指令来操纵,时间上是绝对不允许的。
用于探测火星等行星的探测车也是如此,由地面送来的指令都是指示其靠向目标岩石的,所以需要探测车自行判断,避开前行途中的障碍物,确保其安全到达目的地。
太空机器人开发需要想象力
吉田等人在“隼鸟号”的研究基础上,也着手下一代小行星探测器的研发工作。他们期望下一代小行星探测器能在小行星上停留一段时间,在拍摄小行星表面情况的同时,也能完成对其成分的分析。以此为目标,吉田教授所想到的是开发类似昆虫的机器人。
吉田教授认为,小行星表面的重力非常小,由于昆虫的体重很轻,所以昆虫自身所受的重力应该也是非常小的。从某种意义上来说,几乎可以不受重力的影响而进行活动。要是能模仿昆虫,制造出在微重力环境下行动自如的机器人,那么这种机器人就是今后用于小行星探测的“挑战者”。
吉田教授对太空机器人的开发持有极大的兴趣,他谈了如下感想:宇宙空间与我们在地球上的日常体验是两个截然不同的世界。所以,研究在太空中工作的机器人,地面上所得到的经验未必很理想。需要我们充分发挥各种各样的想象力,并提出富有挑战性的设想,通过实验或计算机模拟来予以验证。当自己的设想被得到证实的瞬间是一个比什么都兴奋的时刻,开发出理想的机器人,必然会成为促进太空开发的源动力,它将关系到行星探测领域更伟大的科学发现。