为了建造行走式机器人,工程师们正在探索人类保持平衡的秘密
完善拟人行走机器人
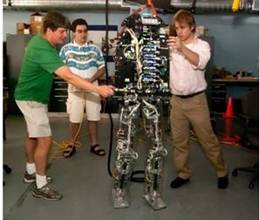
在佛罗里达州彭沙科拉人类识别研究所,普拉特与同事一起装配M2V2,以检验其平衡性
在过去30年里,科学家和技术专家已经解决了以两条腿行走的机器人的制造难题。对人而言,以两腿行走毫不费力,但这一看似简单的动作却隐藏着许多复杂性。直到最近,安装在机器人身上的控制行走的电脑还是非常不理想。现在,遍及全美的几个团队正在完善第一代拟人行走的机器人。这些机器人具有多种能力,从蹒跚而行、防止碰撞,一直到能在崎岖的地面导航行走。
PETMAN是一款由马萨诸塞州沃尔瑟姆市波士顿动力公司(Boston Dynamics)设计的行走型机器人,它具有异乎寻常的以两腿漫步的能力。该机器人没有上身,由两条用钢和塑料制造的双腿连接到一个电力电缆系统。不过,它能像人一样通过脚跟到脚趾的活动自己行走。如果有人从侧面推它,PETMAN能避让并恢复平衡,甚至还穿着鞋。
为什么要把机器人建造成像人的模样呢·研究者们说,首先,行走型机器人为他们提供了度量工程精度的一个基准;其次,它的出现提供了一个改善老年人生活质量的机会;最后,人类需要建造能在人造世界里自行导航的更为实用的机器。
以PETMAN项目为例,为该项目提供资金的军队,需要机器来模拟现实中人在危险环境中的工作,比如对化学防护装备的检测。波士顿动力公司计划到2011年上半年交付新版机器人,新版机器人增加了头和躯干。
波士顿动力公司的创始人兼总裁马克·雷伯特(Marc Raibert)说,在1980年,如何让机器人保持平衡还几乎完全是个奥秘,当时他和其他一些机器人专家正在匹兹堡卡内基梅隆大学的Leg Lab (腿实验室)工作。1986年他离开该实验室转到马萨诸塞州坎布里奇的麻省理工学院。
“由于第一代机器人的需求甚旺,科学家们打算像生产桌子那样生产它们,”他说。以后研究者们认为机器人应当能持久保持平衡。为此,在早期的机器人研究中人们试图准确确定每只脚应当落在何处,以便提前计算出下一步的可能性。然而,人和其他动物并不以这样的方式活动。相反,我们实际上是遵循一种受控下落的方式,用我们的双脚来感觉在走出一步后如何最佳地重新获得平衡。
关键在于编程与控制
在腿实验室工作的研究者试图改用不同的方法。他们创建了一系列机器人,从跳着走的直腿机器人,到看上去更为自然逼真的人形机器人。波士顿动力公司的首个成功范例是一个四条腿的慢走机器人,如Big Dog。这是一个军用项目,设计用于负重穿越崎岖的道路。Big Dog能穿越雪地、森林,以及多石的山峰,这些都是轮式车辆难以通过的区域。
到目前为止,对大多数机器人而言,还无法做到不仅能在水平地面移动,而且能跨越任何障碍。或许最著名的行走式类人机器人,是日本本田汽车公司于1990年代初作为原型引入的ASIMO。甚至在经过了多年的修改以及学习运行后,ASIMO仍然可以被人轻松推倒、难以对付不平坦的地面、移动时采用不那么像正常行走的屈膝步法。
腿实验室的校友已各自分散到几个不同的大学和公司。他们中的一位,杰瑞·普拉特(Jerry Pratt),现在是佛罗里达州彭沙科拉市人类与机器认知研究所的科学家。他说,人能非常迅速地对跌倒作出反应,比大多数机器更快。当你跌倒或失去平衡时,作出反应只需大约0.43秒。而目前的机器人做同样的事至少要花0.6秒,反应慢当然就容易摔跤。
“当你在谈论推倒复原的问题时,这实在是关键所在,”他说。对普拉特来说,印象最深刻的是PETMAN和Big Dog的速度,它们能以这样的速度向若干个方向迈腿移动。最大的问题是,人的双腿在行走时并不真的弯曲,更多的是摆动,相对自由的摆动,直到你对其加力。
此时,脚本能地踏下。你的双腿可以踩在广阔地面的任何一处而不用担心失去平衡,因为双腿在移动中可以保持平衡。然而,大多数机器人的脚与动物的爪子相比,更让人联想到三脚架支柱。普拉特说关键是解决如何编程控制机器人,以便让它们在腿落地后进行再调整。
普拉特的机器人项目M2V2是在腿实验室启动的。自那以来,他已改进了设计,可以让机器单脚站立,甚至在受到推挤时能从一条腿换到另一条腿。
M2V2的灵敏的腿要归功于巴克尔大学,该校工程系代理系主任吉斯·布弗因顿(Keith Buffinton)及他的团队为机器人设计了一条带压力传感器的腿。这一新技术提供给M2V2足够的信息来判断如何调整平衡。而一个患“扁平足”的机器人是做不到这一点的。
拟入机器人用途广泛
所有这一切都使用了远超过建立人形机器人的技术。克里斯·阿特基森(Chris Atkeson),是卡内基梅隆大学机器人研究所的教授,他说,他的目标是搞清楚为何老年人容易跌倒。如果他能在机器人中进行适当模拟,进行相关理论的检验并开发新的有用的方法。“这就需要了解人本身,”他解释说。
同样在日本,ASIMO的服务目标也远比在新闻发布会期间所说的娱乐性更高。本田公司女发言人艾丽西娅·琼斯(Alicia Jones)指出,ASIMO的开发有助于设计助老设备。日本国内迅速增长的老年人口已成为政府很大的焦虑。
阿特基森的小组采用动态捕捉技术来帮助了解人的行为。该技术类似于好莱坞用来产生逼真的计算机图形的技术。他说,在人和机器人之间有两个特征判若云泥。
首先是对运动的“衰减”能力。例如,如果你拍某个人的手掌,手会移动一些位置,但只有拍第二次时,手才回到原来位置。“人很擅长做衰减,”阿特基森说,“我们已经找到一条在机器人中吸收冲击能量的途径”。
其次,是具有把握任意大小的力。要汽车停止运动非常缓慢,因为它们要在整个时间段里逐步换档。这就很难让它们像人那样反应迅速地运动。
另一个要把机器造得像人的原因是,为了人的利益,必须将它们设计得能在世界各地行走,这对机器人本身是有用的。此外,这样的机器人占地小、收纳方便。
普拉特补充道,一个两足的机器人甚至能代替人类从事危险的任务,如太空探险,包括在那种环境中拥有更多的腿,将有助于机器人在崎岖不平的地形上行动更为有效。
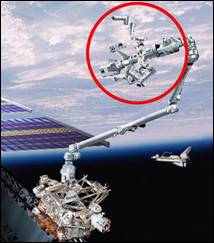
太空机器人DEXTRE
他指出,当年美国航空航天局(NASA)将“火星勘探者”探测器发送到火星时,如果该探测器没能下降到某个火山口,因而它可能也无法工作。
如果是一个有腿机器人(有两只或四只脚)就不会有任何麻烦,普拉特说。
资料来源 The Christian Science Monitor
责任编辑 则 鸣